Scratch 2 オフラインで使える音声対話ロボット/音声対話システム用ブロック
気軽に対話システムや対話ロボット、スマートスピーカーのプロトタイプを作成するには、音声合成、音声認識、および電子回路(目が光る、頭が動く)を Scratch で使えるとよさそうです。それに、常にインターネットに接続できる環境にいるとは限らないので、すべてオフラインで行えるようにしたいところ。ここではそんな Scratch ブロックを実現するための設計方針をまとめます。
- Scratch 2 (Offline)
- ディスプレイに表情や目の動きを作るといった細かい制御は Scratch 側で書くことになるでしょうから、関数やクローンなど、慣れた機能を利用できる Scratch 2 にします。
- Raspberry Pi も使いたいですが、現時点では Adobe AIR が動かないので Scratch 1.4 が選択肢になります。Raspberry Pi は Scratch 3 になるまで少し待つことにします。
- Windows
- 小型の Windows PC は NUC やスティック PC などいろいろ出てきているので、まずは Windows (64bit) で動くことを確認してみます。
- ただし今後 Mac や Linux に展開できるような認識、合成エンジンを選びます。
- インストーラによる配布
- ユーザはPython などの開発環境をインストールせずに済むよう、実行形式で配布します。
- 音声合成、音声認識、Arduino制御といった機能ごとにヘルパーアプリケーション(以下、ヘルパー)を用意し、必要なヘルパーだけインストールできるようにします。



![]()

(クリックするとそれぞれの解説ページへ)
設計
拡張ブロックとヘルパー
- Scratch 2 オフライン版では、
シフトを押しながら [ファイル] メニューを選ぶと [実験的なHTTP拡張を読み込み] を選べます。これで独自ブロックを追加できます。(一方、オンラインは JavaScript の関数で拡張します。) - HTTP拡張で独自に追加したブロックは、ローカルの HTTPサーバと通信し、独自の処理や値の取得ができます。このローカルに用意する HTTPサーバはヘルパー (helper app) と呼ばれます。
- Scratch 2 が接続できるヘルパーを以下のように用意し、それぞれと異なるポート番号で通信することにします。
- s2aio は MrYsLabが開発したものです。これを一部アップデート(日本語化、その他)した上でインストーラを作成します。
- s2microbit-ble は BBC micro:bit と一般的なBluetooth(4.0以上)のアダプタで接続するために作成しました。ブロックは MrYsLabの s2m にできるだけ合わせ、加えて加速度センサなどのブロックを用意しました。互換性を重視して s2m とポート番号を合わせたため、s2aio と同時には使えないようにしています。
| 機能 | ヘルパー名 (github へのリンク) と解説 | ポート番号 | ベースとなるエンジン/API | Scratch デモプロジェクト |
|---|---|---|---|---|
| 音声合成 | s2speak [解説] |
50210/TCP (HTTP) | OpenJTalk | s2speak_demo.sb2 |
| 音声認識 | s2listen [解説] |
50211/TCP (HTTP) | Julius | s2listen_demo.sb2 |
| 顔検出 | s2face [解説] |
50212/TCP (HTTP) | OpenCV | s2face_demo.sb2 |
| Arduino との Firmata 通信 | s2aio [解説] |
50209/TCP (HTTP) | MrYsLab作 PyMata FirmataPlus | s2aio_demo.sb2 |
| micro:bitとBluetooth接続 | s2microbit-ble [解説] |
50209/TCP (HTTP) | node-bbc-microbit | デモ/ビデオ |
ヘルパーによってはさらに別のモジュールと通信します。
- s2listen は Julius と 10500/TCP で通信
- s2aio は Arduino と COMポート/Firmataプロトコルで通信
- s2microbit-ble は BBC micro:bit と Bluetooth 4.0以上 (Bluetooth low energy)で接続
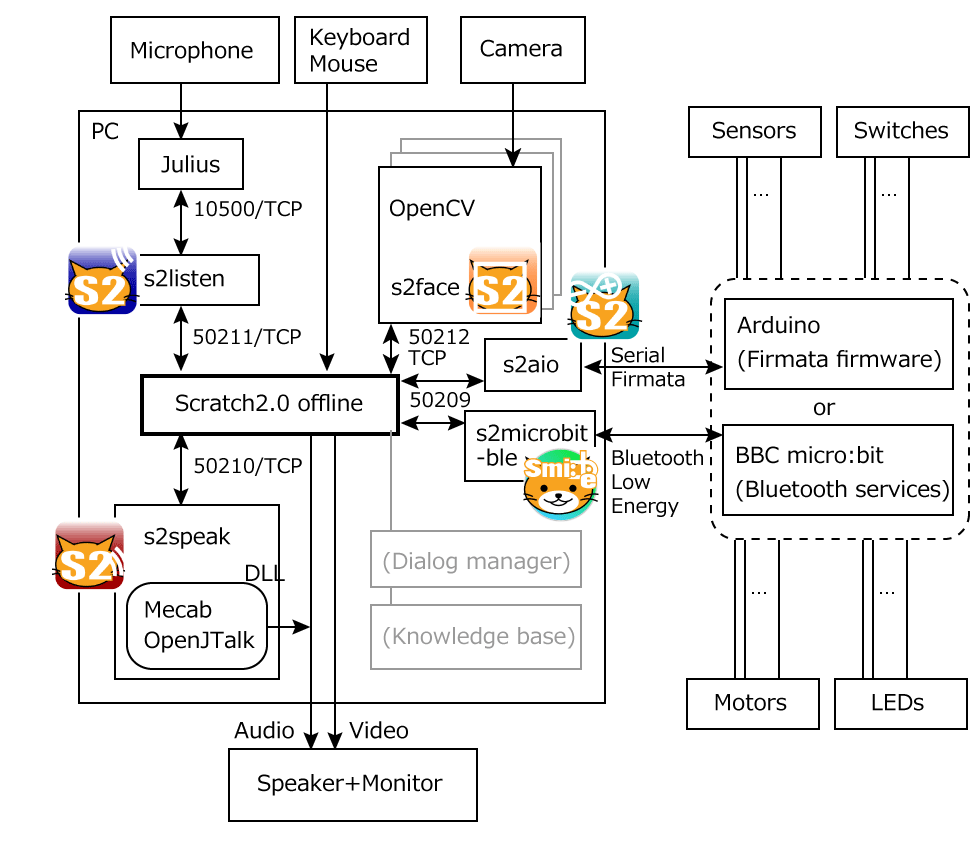
想定するシステムの全体像は以下のような図になります。
ヘルパーの HTTP サーバは非同期 I/O ライブラリを利用
- 各ヘルパーはそれぞれ別のポートでHTTPサーバを立ち上げます。
- Scratch の繰り返しループで大量にリクエストが飛んでくるかもしれません。サーバの軽量化を図るために非同期 I/O ライブラリを用います。すると、各ヘルパーはシングルスレッドでありながら、複数のHTTPリクエストを非同期並列処理できるようになります。
- 実際、MrYsLab の s2aio は Python の asyncio をベースにした aiohttp を用いています。
- Python によるヘルパーの作成方法をこちらの記事にまとめます。
- ただし s2microbit-ble は Javascript (Node.js + Electron + Expressサーバ)です。構成や実装方法はこちらの記事にまとめます。
開発言語およびバージョンの選択
- Python + asyncio + cx_Freeze
- NodeJS (Javascript) + Electron + electron-builder
- 2microbit-ble は noble というモジュールを利用するため NodeJS ベースになります。ビルド方法はこちらの記事にまとめます。
ブロック記載の漢字
- ユーザは小3-4年の漢字が読める子供から広く想定します。
- 一部はあえてひらがなとせず、小5-6年習得の漢字を使用します。(「無効」、「品詞」など)
- 必要があれば、全体をひらがなにしたブロックも後ほど加えることにします。
各ヘルパー (helper app) の説明
s2speak (OpenJTalk)

機能
- テキストを入力すると音声を合成します。
- OpenJTalkとMecab のDLLを利用します(NVDA日本語版で用いられている python ラッパーを一部利用)。
使用方法へのリンク
ブロックの設計
- 再生を待たずに次へ進む
[...]と話すと、再生を待つ[...]と話す(終わるまで待つ)の二種類のブロックを用意します。- 前者の待たないブロックを使うことで、話しながら口パクすることができます。
- 使い方の詳細な例はデモプロジェクト(s2speak_demo.sb2)にまとめます。
拡張性
- 声は数種類のみとし、あとは hts 形式で自由に追加できるようにします。
- 追加の hts ファイルはユーザにアクセス権限のあるユーザ領域に置けるようにします。
s2listen (Julius)

機能
- 音声をテキストに変換します。
- Julius のモジュールモードと通信して結果を取得します。
使用方法へのリンク
- 解説: https://github.com/memakura/s2listen/wiki
- 音声認識ではマイクの設定が重要になるため、Bluetooth ヘッドセットの使用方法などと合わせてまとめます。
- 開発ページ: https://github.com/memakura/s2listen
ブロックの設計
聞こえた言葉のブロックには、聞こえるまで最大(...)秒待つのブロックがトリガーになって認識結果が入ります。- 一方で、
耳に入った言葉には常に(連続的に)認識結果が入ります(Juliusの連続音声認識)。- 連続認識によって、認識開始のトリガーが無くても「起きて」といったキーワードへ反応できます。
- 品詞への分解も行われているため、これを Scratch でも使えるようにします。
- Scratch2では連想配列がないため、各品詞をループ等で順に調べるために
品詞#(品詞番号)を使います。 - 各
品詞#がどの品詞に対応するかを返すブロックとして品詞#(...)の名前を用意します。 - さらに、品詞番号でループを回すときのために、品詞番号の最大を
品詞の数で取れるようにします。
- Scratch2では連想配列がないため、各品詞をループ等で順に調べるために
- 使い方の詳細な例はデモプロジェクト(s2listen_demo.sb2)にまとめます。
拡張性
- 音響モデルは深層学習 (Deep Neural Network) で学習された DNN モデルと差し替え可能ですが、サイズが大きいためインストーラからは外します。
- つまりインストーラから利用できるのは GMM モデル(混合ガウス分布, Gaussian Mixture Model)です。
- DNN モデルはリポジトリには置いてあるので、Python をインストールして用いることができます。
- そういえば HARK に Kaldi の Julius のモジュールモード的インタフェースがあったかもしれず、それを用いることができるのかもしれません(未確認)。
s2aio (Arduino)
![]()

機能
- Arduino とデジタル/アナログ値の入出力ができます。
- サーボも対応しています。
- Firmata プロトコルを用いてます。
使用方法へのリンク
- 解説: https://github.com/memakura/s2aio/wiki
- 開発ページ: https://github.com/memakura/s2aio
- MrYsLab によるオリジナルの開発ページ: https://github.com/MrYsLab/s2aio
- オリジナルに対する主な変更点
- ブロックの日本語化
- aiohttp の使用バージョン変更(0.22.4 -> 2.1.0) に伴う修正
- インストーラ用コード、アイコン追加
ブロックの設計
- オリジナルの s2aio におけるブロックの設計 とします。
- s2aio の前身となる s2a_fm では、日本語化の際に日本語の語順に合わせて HTTP GET のパラメタ順序を入れ替えるような拡張がされましたが、s2aio ではひとまず英語のままの順序とします。
- ピンのモード設定(有効化と無効化)がやや不自然ですが、
有効化や無効化といったキーワードが前にあったほうが間違えにくいかもしれない、という判断です。 - 「有効化」や「無効化」という用語がやや専門的かとも思いましたが、広く使われているのでそのままにします。
- ピンのモード設定(有効化と無効化)がやや不自然ですが、
拡張性
- 内部的には Sonar が実装されているため、距離センサのブロックを追加できるかもしれません。